整合营销服务商
电脑端+手机端+微信端=数据同步管理
免费咨询热线:

电脑端+手机端+微信端=数据同步管理
免费咨询热线:
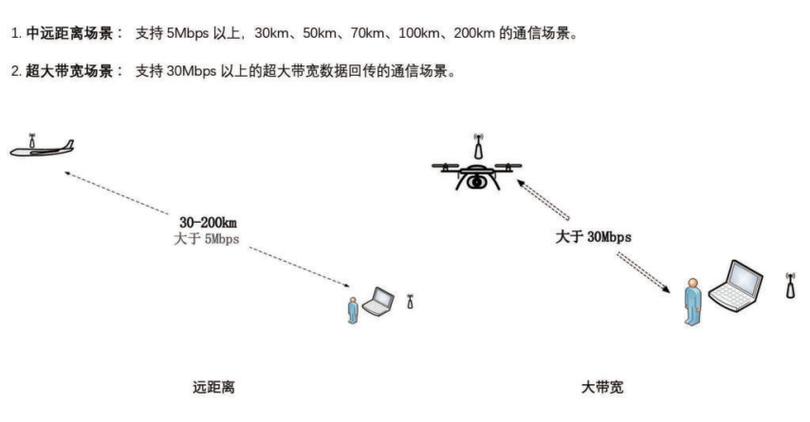
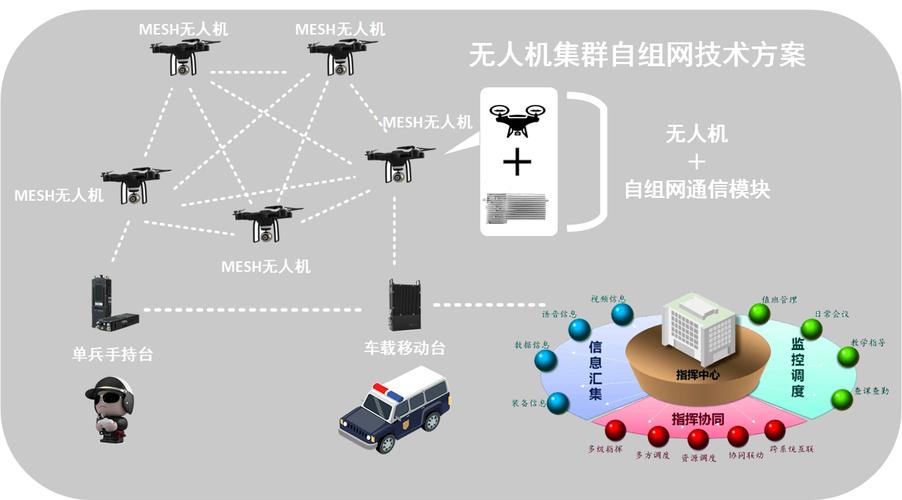
无人机集群作战通信Amesh自组网的关键技术探讨
在复杂战场环境中,集群无人机Amesh网络以其高度的自适应性、抗毁性和网络拓扑结构动态可变性等的巨大优势成为未来无人机集群作战的研究热点。文章阐述了无人机Amesh网络的基本概念,分析了无人机Amesh网络的研究目的、面临的问题,探讨了集群无人机amesh网络的关键技术。
关键词:集群无人机;Amesh网络;关键技术
随着无人机技术、通信与网络技术等的迅速发展,无人机在军用领域的应用越来越广泛,特别是在复杂多变的战场环境下,无人机执行情报侦察、战场监控、目标打击、电子对抗、中继通信等任务的优势越来越明显[1]。但同时单架无人机执行上述任务面临着监视范围窄、监视角度小、杀伤半径小、工作效率低、毁伤能力弱等诸多方面的限制,制约了整体无人机系统作战效能的提高。因此,无人机集群作战将是未来战场的主流趋势。
1 无人机自组网简介
1.1 无人机自组网基本概念
无人机自组织网络(无人机Amesh网络)是在无人机集群协同作战中,无人机间的通信不完全依赖于地面控制站或卫星等固定基础通信设施,而是将无人机作为移动网络节点,各节点间依靠无线通信设备模块实现无线通信的自主管理的动态网络[2]。其具备无线多跳路由、节点高速移动性、网络拓扑结构高动态变化性、节点网络结构的异构性、非集中和自组织性、抗毁伤及抗干扰、智能性强等特点[3-5]。
1.2 无人机自组网研究的主要目的
(1)提高无人机集群的作战效能。由于单个无人机携带模块的限制,只能完成特定作战任务,要想其完成其他作战任务得由其他无人机完成,或者通过更换模块然后重新升空完成任务,这样使得无人机整体的作战效能低[6]。但当无人机集群形成自组网络时,此时的无人机集群就是一个完整的有机系统,可以同时完成多种作战任务,这样便可大幅度提高无人机集群的作战效能。
(2)实现系统的可控性。无人机自组网是由所有无人机节点联网后所形成的,因此,地面站控制中心或卫星等设备既可以对每个终端直接控制,还通过自组网实现对终端的控制。
(3)提高无人机系统抗干扰的能力。通过自组网络使得无人机集群间不再是简单的链式结构,即使在链中的任何环节出现故障,无人机整个无人机系统也不会瘫痪,这就意味着无人机系统的抗干扰能力得到了大幅提高[7]。
2 无人机自组网面临的问题
这几年来无人机自组网的设计研究一直都是实现无人机集群作战的核心方向之一,而且美国的研究报告《无人机路线图》和《无人系统一体化路线图》都重点指明无人机自组网设计是未来无人机集群作战网络的研究方向,但是目前依然面临着许多问题。
2.1 路由协议与MAC层协议问题
集群无人机执行作战任务时,无人机节点间的相对移动较快,且网络拓扑结构复杂,势必导致分组数据的丢失和路由的重新选择,这将会增加集群无人机自组网的开销,造成数据网络传输的堵塞紊乱,降低了信道的利用率[7],这就需要依靠路由协议与MAC层协议去解决。
2.2 网络服务质量(QoS)问题
集群无人机自组网的重要功能之一便是实现数据信息的可靠高速传输,服务质量控制算是无人机集群作战自组网的关键技术之一。由于无人机自组网具备路由多跳性、网络拓扑结构多变性、带宽有限性等,使得网络服务质量难以得到保证。
2.3 安全性及信息处理能力问题
自身无线链路因固有的开放特性而存在无线信道传送的数据信息容易被竊听、篡改及干扰等安全漏洞[8];由于无人机自组网传输的信道带宽有限,如果这些数据信息不进行过滤、融合、压缩等预处理,会直接影响无线信道传输的效率,容易造成信道的阻塞。
3 无人机自组网的关键技术
3.1 路由协议
由于无人机集群作战的自组网中的无线通信是通过无人机节点进行的,网内的每个无人机节点都可以作为路由器,向其他节点转发数据,因此,开发一种良好的路由协议是建立可靠、高效、扩展性好的无人机Amesh网络的关键[9]。一种理想的路由协议通常要能实现以下功能:(1)能动态感知自组网拓扑结构的变化;(2)能自主维护自组网拓扑的连接;(3)高度自适应的路由;(4)提供安全机制等。目前的无人机自组网路由协议通常分为反应式路由、先应式路由、混合式路由、静态路由、基于地理位置路由等,如表1所示[2]。所以,开发一种适合无人机集群作战自组网的路由协议是解决实现无人机自组网可靠高速数据传输的关键。
3.2 MAC协议
MAC层协议直接管理着无线信道上分组的收发,它直接决定非常有限的无线通信资源的效率高低,对无人机Ad hoc网络的性能起着关键性的作用。高效的MAC协议应该具备更高的信道重用能力、避免信道数据冲突能力、有效解决数据冲突的能力等。针对信道接入策略的不同,目前的无人机Amesh网络的MAC协议通常可分为3类:(1)基于竞争机制的MAC协议;(2)基于调度机制的MAC协议;(3)混合类MAC协议。
3.3 服务质量
由于无人机Amesh网络具有无线多跳路由、网络拓扑结构复杂多变、带宽有限等特性,使得传统的服务质量控制协议不能满足无人机集群Amesh网络间数据信息的可靠高速传输要求,所以,急需研究设计一款高效的网络服务质量控制协议,使得无人机Ad hoc网络中各节点能协同工作,共同高效完成作战任务。目前无人机Amesh网络的服务质量控制协议主要有:QoS信令协议、系统QoS模式、QoS-MAC访问控制及QoS路由算法等。
3.4 网络安全策略与认证技术
由于无人机Amesh网络通过在无人机节点间进行无线信道通信,易受到被动窃听、敌方入侵、信息拦截、篡改伪造等攻击。当无人机节点在复杂战场上高速移动时,由于移动终端与无线网络之间缺乏固定的物理连接,网络易被其他用户占用,也使得受到攻击的风险增加。当前可用的网络安全策略主要有[9]:(1)基于密码的认证协议,是指所有网络节点都参与对话密钥的生成,因此,攻击者无法阻止密钥的生成。(2)“复活节鸭”安全模型,“复活节鸭”安全模型基于鸭子在孵化时将第一个移动物体视为其母亲的原则。(3)异步分布式密钥管理,该方法使用加密机制来保护路由信息和数据交换。
4 结语
在未来复杂的战场环境中,集群无人机依托Amesh网络协同通信作战是未来无人机集群作战的主流趋势,因此,无人机Ad hoc网络技术的研究具有广泛的前景,其中,通信网络中路由协议、MAC协议、QoS协议及网络安全技术是未来无人机集群Amesh网络的重点研究方向。
并行计算与集群技术(2)
云计算基础架构——集群技术 集群的基本概念
集群是一组独立的计算机(结点)的集合体,结点间通过高性能网络相连接,各结点除了作为一个单一的计算资源供用户使用外,还可以协同工作,并表示为一个单一的、集中的计算资源,供并行计算任务使用。集群是一种造价低廉、易于构建并且具有较好可扩展性的体
系结构。集群具有以下重要特征:
集群中的各个结点都是一个完整的计算机系统,结点可以是工作站,也可以是PC或对称多处理器SMP.网络连接上通常使用如以太网、FDDI、光纤等商用网络设备,部分商用集群也采用专
用网络互联。网络接口与结点的I/O总线松耦合相连。各结点具有本地磁盘。各结点有自己的独立的操作系统。
集群系统的设计中要考虑5个关键问题。可用性:集群系统有一个提供可用性的中间层,它使集群系统可以提供检查点、故障
接管、错误恢复以及所有结点上的容错支持等服务。从而可以充分利用集群系统中的冗余资
源,使系统在尽可能长的时间内为用户服务。单一系统映像 SSI (Single System Image) : 集群系统与一组互联工作站的区别在于,集群系统可以表示为一个单一系统。集群系统中也有一个单一系统映像的中间层,它通过组合各结点上的操作系统提供对系统资源的统一访问。作业管理(Job ) : 因为集群系统需要获得较高的系统使用率,集群系统上的作业管理软件需要提供批处理、负载平衡、并行处理等功能。并行文件系统PFS: 由于集群系统上的许多并行应用要处理大量数据,需进行大量的 I/0操作,而这些应用要获得高性能,就必须要有一个高性能的并行文件系统。高效通信( ) : 集群系统比MPP 机器需要一个更高效的通信子系统,因为集群系统的结点复杂度高,结点间的连接线路比较长,带来了较高的通信延迟,同时也带来了可靠性、时钟扭斜(Clock Shew) 和串道(Cross-Talking) 等问题。 集群系统的分类
(1) 高可用性集群系统
高可用性集群系统通常通过备份结点的使用来实现整个集群系统的高可用性,活动结点
失效后备份结点自动接替失效结点的工作。高可用性集群系统就是通过结点冗余来实现的,一般这类集群系统主要用于支撑关键性业务,保证关键性业务的不间断服务。
(2) 负载均衡集群系统
负载均衡集群系统中所有结点都参与工作,系统通过管理结点(利用轮询算法、最小负
载优先算法等调度算法)或利用类似一致性哈希等负载均衡算法实现整个集群系统内负载的均衡分配。
(3) 高性能集群系统
高性能集群系统主要是追求整个集群系统强大的计算能力,其目的是完成复杂的计算服务,在科学计算中常用的集群系统就是高性能集群系统,目前物理、生物、化学等领域有大
的高性能集群系统提供服务。
(4) 虚拟化集群系统
(4) 虚拟化集群系统
在虚拟化技术得到广泛使用后,人们为了实现服务器资源的充分利用和切分,将一台融
务器利用虚拟化技术分割为多台独立的虚拟机使用,并通过管理软件实现虚拟资源的分配和管理。这类集群系统称为虚拟集群系统,其计算资源和存储资源通常是在一台物理机上。利用虚拟化集群系统可以实现虚拟桌面技术等云计算的典型应用。
目前基于集群系统结构的云计算系统和大数据系统往往是几类集群系统的综合,它既需
要满足高可用性的要求又尽可能地在结点间实现负载均衡,同时也需要满足大量数据的处理任务。Hadoop、HPCC (High Cluster, 高性能计算集群)这类大数据系统中,前三类集群系统的机制都存在,而在基于虚拟化技术的云计算系统中采用的往往是虚拟化集群系统。
**集群文件系统:**集群文件系统存储数据时并不是将数据放置于某一个结点存储设备上,而是将数据按一定的策略分布式地放置于不同物理结点的存储设备上。集群文件系统将系统中每个结点上的存储空间进行虚拟的整合,形成一个虚拟的全局逻辑目录,在进行文件存取时依据逻辑目录按文件系统内在的存储策略与物理存储位置对应,从而实现文件的定位。集群文件系统相比传统的文件系统要复杂,它需要解决在不同结点上的数据一致性问题及分布式锁机制等问题,所以集群文件系统一直是云计算技术研究的核心内容之一。
集群文件系统分为多种类型,按照对存储空间的访问方式,可分为共享存储型集群文件
系统和分布式集群文件系统,前者是多台计算机共享同一存储空间,并相互协调共同管理其上的文件,又被称为共享文件系统;后者则是每台计算机各自提供自己的存储空间,并各自协调管理所有计算机结点中的文件。Veritas的 CFS, 昆腾 , 中科蓝鲸 BWFS, EMC 的
MPFS, 属于共享存储型集群文件系统;而HDFS、GFS、Gluster、Ceph、Swift 等互联网常用的大规模集群文件系统都属于分布式集群文件系统。分布式集群文件系统可扩展性更强,目前已知最大可扩展至10K个结点的规模。
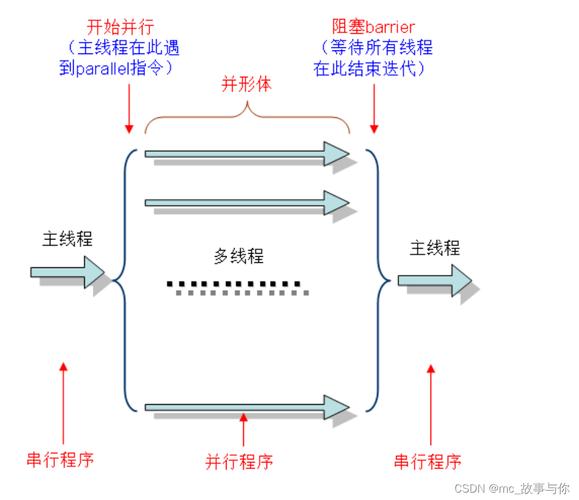
并行计算的分类:
(1)按Flynn分类
斯坦福大学教授 Michael J. Flynn 于1972 年提出了经典的计算机结构分类方法,从最抽
象的指令和数据处理方式进行分类,通常称为 Flynn 分类方法。Flynn 分类方法关注的是指令流( Stream) 、数据流(Data Stream) 利名倍性() , 按照, Fiynn 分类法,空间上的并行计算可分为两类,单指今名粉掘流和多指今多数据流。
(1)单指令多数据流(Single stream Data stream, SIMD) .是一种采用一个控制器来控制多个处理器,同时对一组数据(又称“数据矢量”) 中的每一个数据分别执行相间的操作,从而实现空间上的并行技术。SIMD实现了数据级并行技术,其典型代表是向量处理器(Vector ) 和阵列处理器(Array ) .SIMD 技术的关键是在1条单独的指令中同时执行多个运算操作,以增加处理器的吞吐量。为此,SIMD结构的CPU有多个执行部件,但都在同一个指令部件的控制之下,中央控制器向各个处理单元发送指令,整个系统只要求有一个中央控制器,只要求存储一份程序,所有的计算都是同步的。现在用的单核计算机基本上都属于SIMD机。
)单指令多数据流(Single stream Data stream, SIMD) .是一种采用
一个控制器来控制多个处理器,同时对一组数据(又称“数据矢量”) 中的每一个数据分别执
行相间的操作,从而实现空间上的并行技术。SIMD实现了数据级并行技术,其典型代表是向
量处理器(Vector ) 和阵列处理器(Array ) .
SIMD 技术的关键是在1条单独的指令中同时执行多个运算操作,以增加处理器的吞吐
量。为此,SIMD结构的CPU有多个执行部件,但都在同一个指令部件的控制之下,中央控
制器向各个处理单元发送指令,整个系统只要求有一个中央控制器,只要求存储一份程序,所有的计算都是同步的。现在用的单核计算机基本上都属于SIMD机。
2) 多指令多数据流( stream Data stream, MIMD) .在任何周期内,不同的处理器可以在不同的数据片段上执行不同的指令,即同时执行多个指今流。而这些指令流分别对不同数据流进行操作。MIMD是使用多个控制器来异步地控制多个处理器,能实现作业、任务、指令、数组各级全面并行的多机系统。最新的多核计算平台都属于 MIMD 的范畴,如 Intel 和AMD的双核处理器等都属于MIMD.
按应用的计算特征分类
按照应用的计算特征,可将并行计算分为以下两类。
数据密集型并行计算(Data- ) , 它使用数据并行方法处理大数据(通常为TB或PB级)。数据密集型并行计算用于描述 I/O绑定的应用程序或需要处理
大量数据的应用程序,这些应用程序将其大部分处理时间用于I/O以及数据的移动和处理。对
数据密集型应用程序的并行处理通常涉及将数据划分或细分为多个部分,这些部分可以使用相同的可执行应用程序在适当的计算平台上并行地独立处理,然后重新组合结以产生完整的输出数据。数据总量越大,并行处理数据的好处越多。数据密集型处理需求通常根据数据总量的大小线性地进行缩放,并且非常适合直接并行化处理。计算密集型并行计算(- ) , 计算密集型是用来描述计算绑定的应用程序。这些应用程序将大部分执行时间用于计算需求,而不是I/O, 通常需要少量的数据。计算密集型应用程序的并行处理通常涉及在应用程序进程中并行化各个算法,并将整个应用程序进程分解为单独的任务,然后可以在适当的计算平台上并行执行,以实现比串行处理更高的整体性能。在计算密集型应用程序中,多个操作是同时执行的,每个操作都会解决问题的特定部分,这通常也称为任务并。较为传统的高性能计算领域中大部分都是这一类型,如天气预报、高分辨率的核武器数值模拟、图像处理等科学计算。
按结构模型分类
并行向量处理机 PVP
并行向量处理机( Vector , PVP) 是并行结构模型的一种,包含为数
不多、功能强大的定制向量处理器。定制高带宽纵横交叉开关及高速的数据访问模型、通
常不使用高速缓存,而是使用大量的向量寄存器及指令缓存,使得该模型对程序编测的要
求非常高。
对称式多处理器SMP:
对称式多处理器共享存储,即任意处理器可直接访问任意内存地址,且访问延迟、带宽、几率都是等价的,系统走对称时。微处理器一般少于64个,处理器有限的原因是总线和交叉开关一旦做成就难于扩展。典型代表有 IBM R50. SCr Power 、SUN 和曙光一号等。
分布式共享存储器 DSM
分布式共享存储器( Shared Memory, DSM) 也是共享存储,即逻辑上(田
户)是共享存储的,但内存模块物理上分布于各个处理器内部,这种结构也称为基于Cache
录的非一致内存访问(CC-NUMA) 结构。这种结构使得局部内存与远程内存访问的延迟和带
宽不一致。DSM的微处理器可以有16~128个,典型代表有SGI Origin 2000, Cray T3D等。
DSM以结点为单位,每个结点有一个或多个CPU; 采用专用的高性能互联网络连接;采
用分布式存储,即内存模块分布在每个结点中,采用单一内存地址空间,即所有内存模块都由硬件进行统一编址,各个结点既可以直接访问局部内存单元,又可以直接访问其他结点的局部内存单元;单一的操作系统;DSM可扩展到上百个结点。DSM与 SMP的主要区别是 DSM 在物理上有分布在各个结点的局部内存,但逻辑上形成一个共享的存储器。
大规模井行处理机 MPP
大规模并行处理机( , MPP) 在物理和逻辑上都是采用分布内存,因此能扩展其结构至成百上千个处理器(微处理器或向量处理器)。但其采用的是高通信带宽和低延迟的互联网络,需要专门设计和定制。典型代表有 CRAY T3E (2048) 、ASCI Red(3072) 、IBM SP2、曙光1000等。
MPP每个结点相对独立,有一个或多个微处理器;每个结点均有自己的操作系统和自己独立的内存,避免了内存访问瓶颈,但各个结点只能访问自己的内存模块,因此扩展性较好。 MPP是一种异步结构的MIMD, 即程序系统由多个进程组成,每个进程都有其私有地址
空间,进程间采用传递消息相互作用。
工作站集群COW
工作站集群(Cluster Of , COW) 也称为NOW (Network of ) ,
COw 的每个结点都是一个完整的工作站(计算机), 有独立的硬盘与操作系统(如 UNIX) :
各个结点间通过高性能网络或低成本的网络(如千兆以太网)相互连接,网络接口和I/O总线松耦合连接,每个结点安装消息传递软件,实现通信和负载平衡等。COW的典型代表
是Beowulf cluster 微机集群。目前COW (NOW) 与MPP之间的界线越来越模糊。COW典型代表有曙光3000和4000、ASCI Blue 等。
*请认真填写需求信息,我们会在24小时内与您取得联系。
